Micromouse: stepper precision prototype
After v4’s 2nd-place finish, I engineered v5 with 0.9-degree stepper motors, aluminum wheels, and under-chassis IR sensors. A thermal driver failure forced me to abandon the build, but every lesson went directly into v6’s winning design.
Story
After the v4 prototype’s 2nd-place finish, I pushed for a different class of precision. Wall-followers work, but their encoder-based dead reckoning accumulates drift over longer runs. Stepper motors promised an exact count of steps per revolution with no slip, making distance and angle tracking mathematically precise.
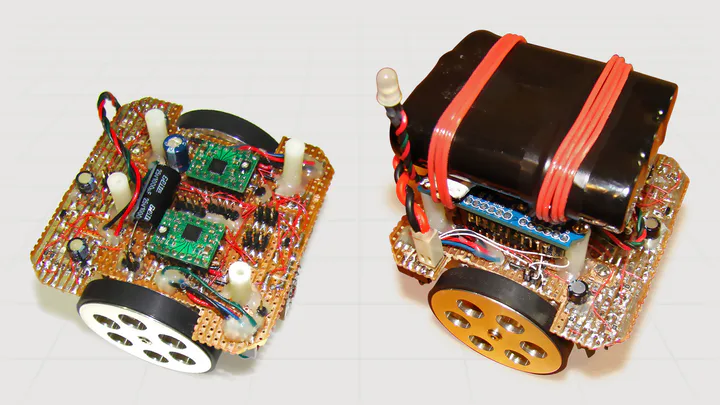
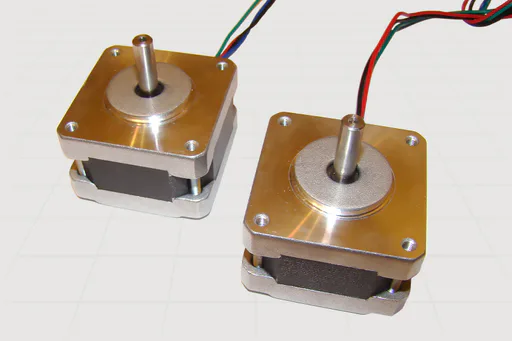
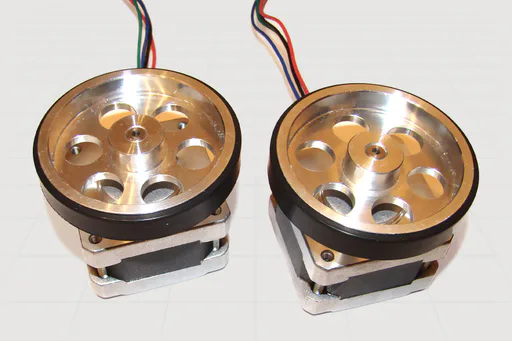
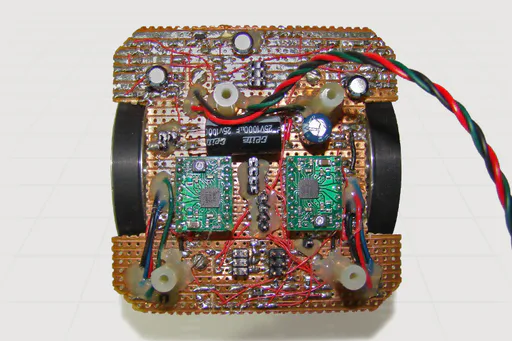
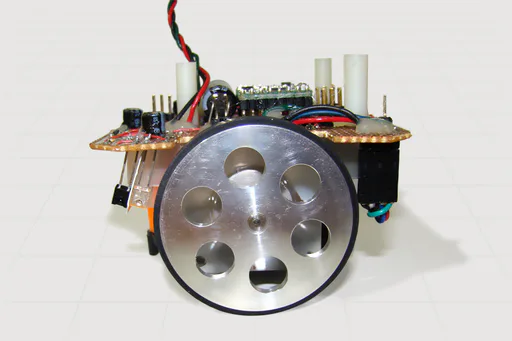
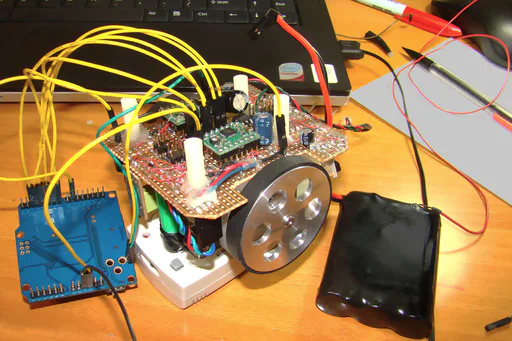
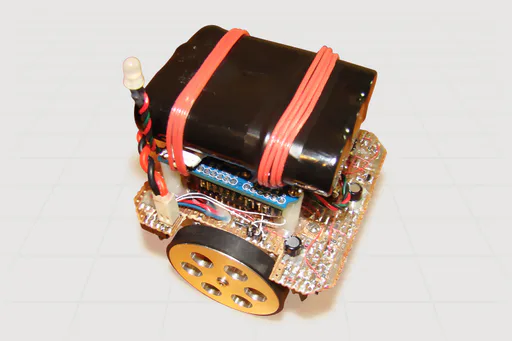
I sourced a pair of 0.9-degree steppers from MotionKing (model 16HM2410-05A) directly from China, giving 400 steps per revolution. North American suppliers simply did not carry them. Solid aluminum wheels with rubber tires prevented skidding. IR sensors went upside-down under the chassis, away from overhead contest lighting. Power was split between a 3S Li-ion pack for the motors and a separate LiPo for the MCU and sensors, keeping motor noise off the ADC lines.
Days after final assembly, one of the A4983 stepper drivers burned out. I spent hours swapping ICs, probing voltages, and retracing paths but could not isolate the root cause. With the contest timeline closing in, I made the call to stop and start over.
That failure shaped v6 more than any success had. Every dead component became a rule: separate motor and logic batteries, isolated driver circuits, conservative current limits, and proper thermal headroom baked in from the first layout decision.
And do not lose hope in the mercy of Allah, for no one loses hope in Allah's mercy except those with no faith.
Impacts
- Introduced 0.9-degree stepper motors (400 steps/rev) to the build, eliminating encoder drift and enabling sub-millimeter distance tracking
- Established the dual-battery isolation architecture that became the foundation of v6’s reliable contest performance
Challenges & Solutions
Challenges
- 0.9-degree stepper motors were not available from any North American supplier
- An A4983 stepper driver failed under sustained load despite current limiting and bypass capacitors
- IR sensors picking up electrical noise from motor drivers and ambient light from above the chassis
Solutions
- Contacted MotionKing directly and imported the 16HM2410-05A motors from China
- After exhausting on-board diagnostics without finding the root cause, made the deliberate decision to abandon v5 and codify every failure as a hard design rule for v6, including conservative thermal headroom and fully isolated motor power
- Isolated the power domains with a dual-battery system, 3S Li-ion for motors and LiPo for logic, and mounted sensors upside-down under the chassis to block both noise sources physically