Micromouse: sensor & chassis prototyping
During my university freshman year, I built three rapid Micromouse prototypes to develop a compact differential-drive chassis and custom infrared wall sensors, establishing the mechanical and sensing foundation for a fully autonomous maze-solving robot.
Story
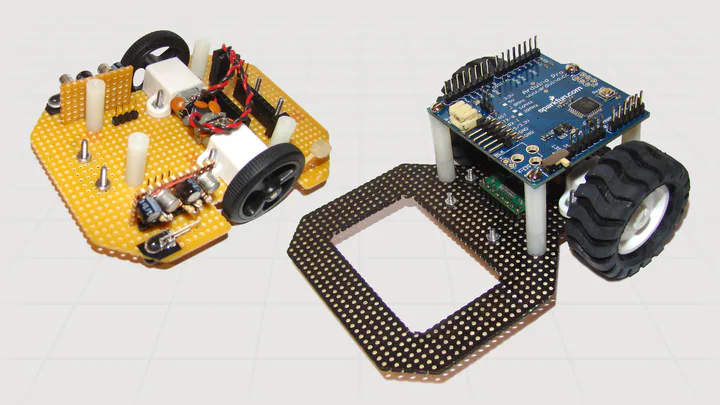
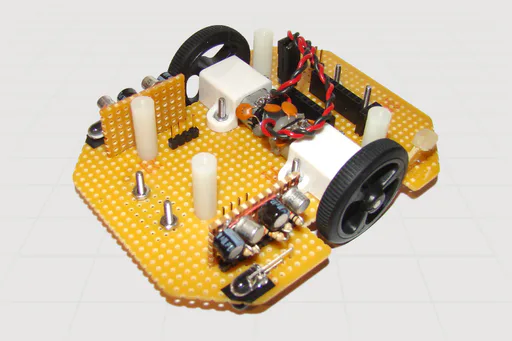
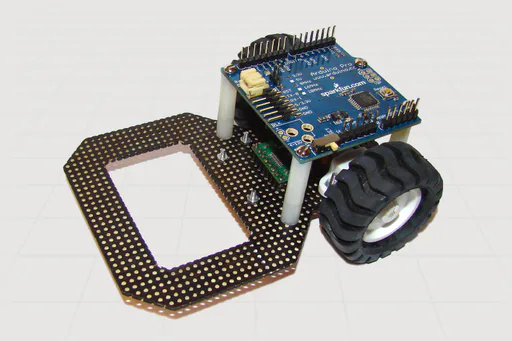
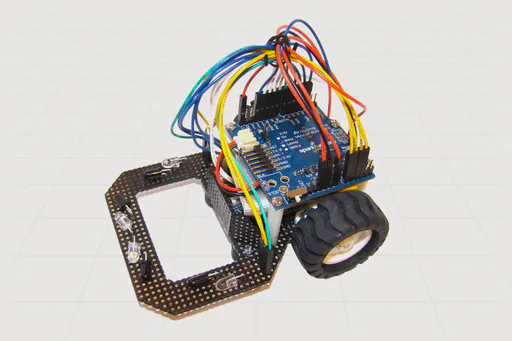
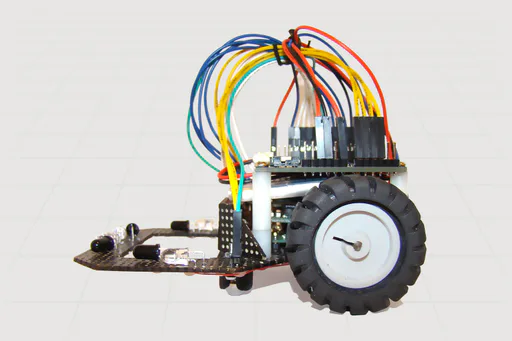
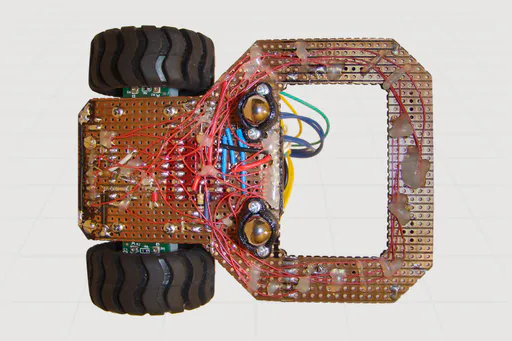
During my freshman year, I started the Micromouse challenge by building three rapid prototypes, v1 through v3, to lock in the mechanical and sensing foundation before writing a single line of maze algorithm. Each iteration refined the differential-drive chassis, adjusting weight distribution, motor mounting, and sensor placement within the competition’s strict size limits.
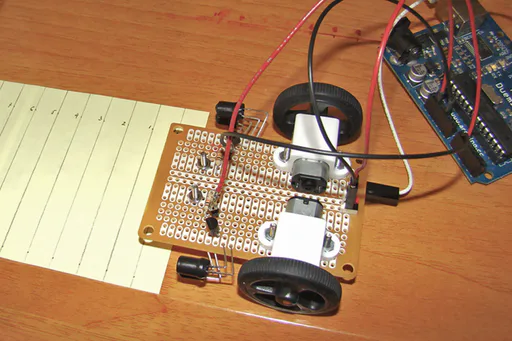
I designed custom IR wall sensors using infrared LEDs and photodetectors. Each photodetector had its own decoupling capacitor to suppress interference from ambient light and motor EMI. Getting consistent readings under contest lighting took real tuning. Sensor placement shifted from side-mounted to forward-diagonal across iterations, improving detection accuracy at both 90° and 45° wall angles.
Locomotion used gearmotors with integrated encoders driven through H-bridge drivers, with closed-loop speed control written in C++ on an Arduino. To remove the serial cable entirely during dynamic testing, I adapted the 433 MHz RF modules from my wireless gamepad project into a full-duplex serial bridge to a PC. This let me log sensor values, motor PWM, and encoder counts in real time without anything dragging on the robot.
The result was a stable, noise-resistant, untethered test platform, ready for the algorithm work ahead.
As for the sky, He raised it high and set the balance, so that you do not defraud the scales.
Impacts
- Completed three chassis-and-sensor iterations in two weeks, producing a reliable platform for competition development
- Eliminated tethered testing by bridging 433 MHz RF to a PC serial terminal for real-time diagnostics during live runs
Challenges & Solutions
Challenges
- IR photodetectors picking up ambient light and motor EMI, producing noisy wall readings
- Serial cable drag distorting robot movement and skewing sensor readings during dynamic tests
- Chassis instability under differential drive at speed within tight size constraints
Solutions
- Added a decoupling capacitor per photodetector and moved sensor placement from side-mounted to forward-diagonal for stable 90° and 45° wall detection
- Integrated 433 MHz RF modules, reused from the wireless gamepad project, for full-duplex serial passthrough to a PC with no physical tether
- Iterated weight distribution and motor mounting across three builds, arriving at a balanced layout with a ball caster for smooth pivoting