Micromouse: IEEE R1 wall-follower runner-up
After my early prototypes, I built Micromouse v4 on a perfboard chassis with micrometal gearmotors and custom infrared sensors. Earned 2nd place at the 2010 IEEE Region 1 contest, rebuilt entirely from scratch in six days after losing v3 on the subway.
Story
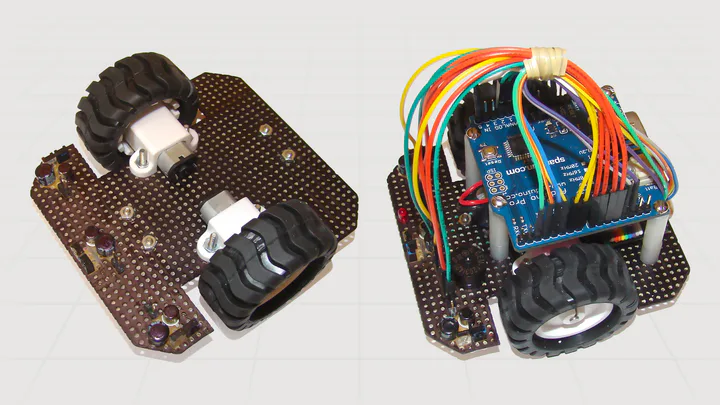
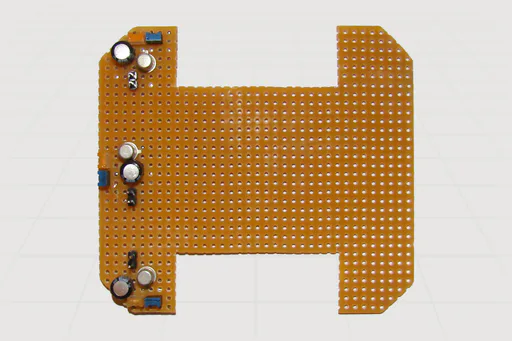
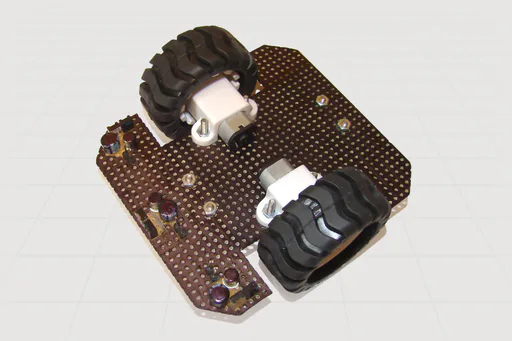
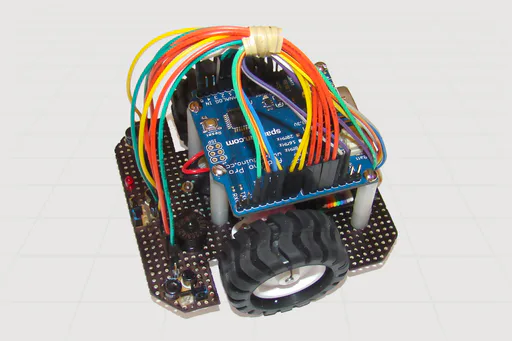
With the IEEE Micromouse deadline approaching, I designed v4 as a compact, reliable platform focused on consistency over complexity. The chassis was perfboard, which served as both the structural base and the circuit board, letting me mount all components on a single rigid layer without a separate frame.
A few days before I started, I lost my v3 prototype on the subway. Left it in a bag under the seat on a late-night ride home and never saw it again. Instead of falling behind, I used it as a forcing function. I rebuilt from scratch in six days (March 27 to April 2), re-evaluating every component, joint, and line of code with fresh eyes.
So, surely with hardship comes ease.
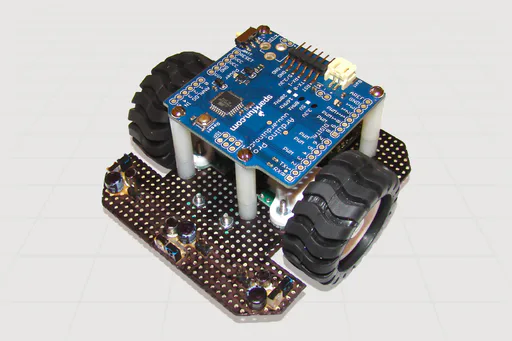
Three infrared LED and photodetector pairs handled wall sensing, each with a decoupling capacitor to kill noise from ambient light and motor EMI. Micrometal gearmotors with magnetic encoders drove the wheels through H-bridge drivers. Two ball casters kept the chassis level during pivots. A SparkFun Arduino Pro running ATmega328P handled everything, powered by a single LiPo.
The wall-follower algorithm in C++ prioritized cornering consistency over speed. There was no time for complex tuning, so I focused on getting the hardware right. At the 2010 IEEE Region 1 contest at Temple University in Philadelphia, v4 ran multiple clean passes and placed 2nd. The takeaway was simple: reliable hardware beats clever algorithms under deadline pressure.
Impacts
- Earned 2nd place at the 2010 IEEE Region 1 Micromouse Competition at Temple University
- Rebuilt the entire robot from scratch in six days after losing v3 on the subway, and still competed successfully
Challenges & Solutions
Challenges
- Fitting motors, encoders, H-bridge drivers, sensors, Arduino, and a LiPo into a 9x9 cm footprint
- IR photodetectors producing inconsistent readings under variable contest lighting
- Executing accurate 90-degree turns with gearmotors prone to slip and speed variation
Solutions
- Used perfboard as both the structural chassis and the circuit board, eliminating a separate mounting layer and keeping all electronics on one rigid plane
- Added a decoupling capacitor per photodetector to suppress ambient light interference and motor EMI
- Implemented encoder-based PID control for turns, measuring actual wheel rotation rather than relying on open-loop timing