Micromouse: IEEE R1 floodfill runner-up
After v5’s driver failure, I rebuilt v6 with dual-battery isolation, 0.9-degree steppers, and a floodfill algorithm. As the only solo entrant in a field that included multi-member teams, I earned runner-up at the 2011 IEEE Region 1 contest at Boston University.
Story
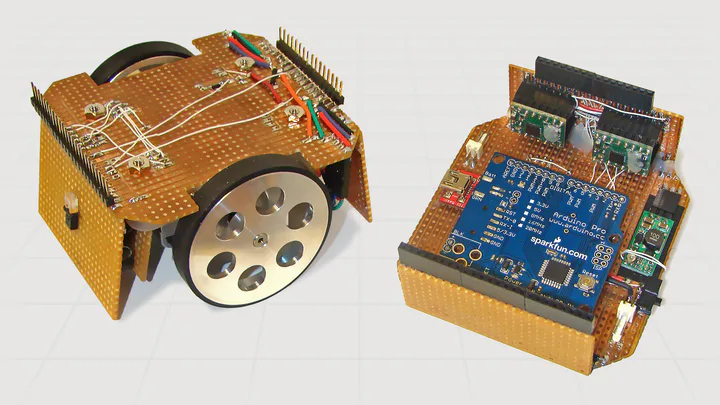
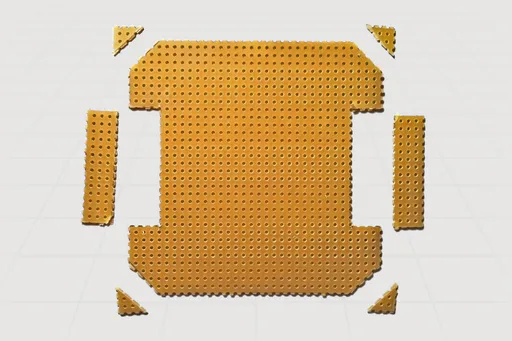
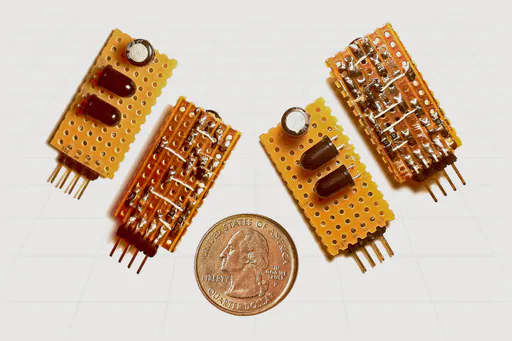
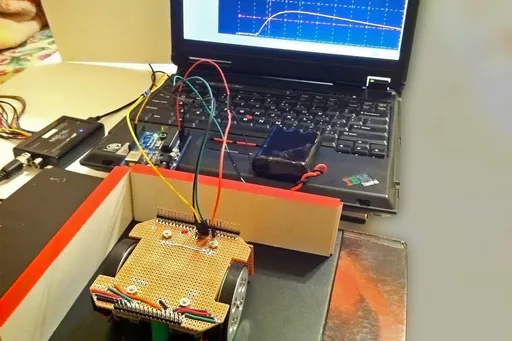
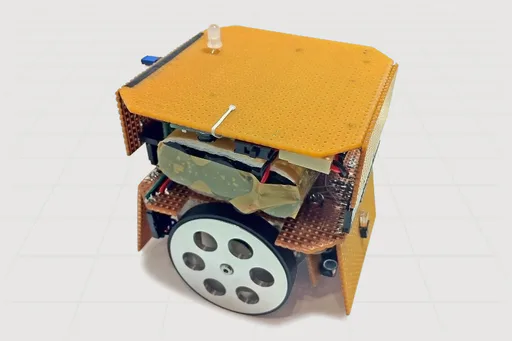
After the lessons learned from the v5 prototype, I rebuilt v6 from scratch for the 2011 IEEE contest. The chassis was re-engineered for modularity. Four side-mounted sensor modules got larger infrared LEDs for stronger, more reliable signals. All sensors were positioned under the chassis to block ambient light and overhead glare. I verified every signal on an oscilloscope the night before the contest.
The 0.9-degree steppers (400 steps/rev) drove aluminum wheels with rubber tires, giving drift-free motion. A 3S Li-ion pack powered the motors while a separate LiPo supplied clean voltage to the MCU and sensors, eliminating EMI crossover. The floodfill algorithm, written in C, explored every accessible path, calculated costs, then executed the shortest route to the center. The entire 16x16 maze state was encoded in bit-packed arrays to fit inside 2 KB of RAM.
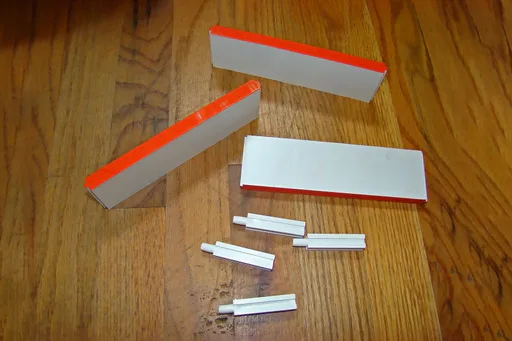
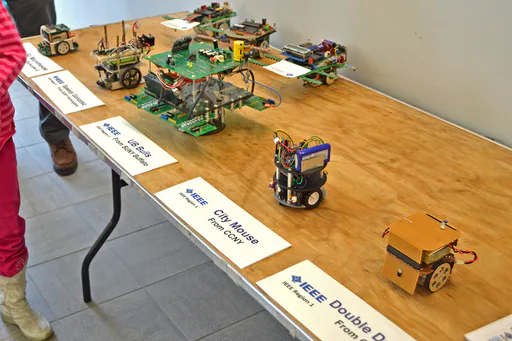
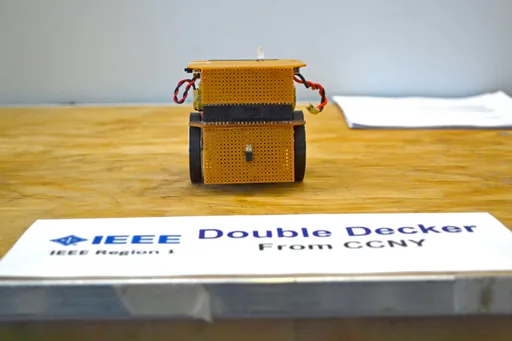
I ordered official maze walls from England and built a half-size 8x8 test maze on MDF with drilled pegs for practice runs at home. At Boston University on March 26, 2011, Double Decker navigated the full maze without fault, exploring, mapping, and solving cleanly. As the only solo entrant in a field that included teams of up to 15 members, it placed runner-up. Designing the hardware, writing the firmware, and developing the algorithm alone made that result mean a lot to me.
He is the One Who spread out the earth for you and made pathways in it so that you may find your way.





Impacts
- Earned runner-up at the 2011 IEEE Region 1 Micromouse Competition at Boston University as the only solo entrant against multi-member teams
- Implemented a floodfill maze-solving algorithm within a 2 KB RAM constraint using bit-packed maze data, successfully navigating a full 16x16 official maze
Challenges & Solutions
Challenges
- Rebuilding the entire robot from scratch in four months after v5’s driver failure, with a fixed contest date
- IR sensors producing unreliable signals under variable overhead lighting at the contest venue
- Running a full floodfill exploration and solve cycle within the AVR’s 2 KB RAM
Solutions
- Treated every v5 failure observation as a concrete design rule by using separate motor and logic batteries, isolated A4983 drivers with conservative current limits, and full power decoupling throughout. The result ran without fault through the entire contest.
- Redesigned four modular sensor assemblies with larger IR LEDs for stronger output, mounted them under the chassis to block glare, and verified every signal on an oscilloscope the night before competing
- Encoded the entire 16x16 maze state in bit-packed arrays, keeping the memory footprint small enough to run the algorithm in real time without dynamic allocation